
The shortest possible answer:
I don’t know.
The slightly longer answer:
The evidence suggests so, but I can’t prove it, nor can I find an existing proof. Maybe you can!
Notation:
An integer 


![[a_n, a_{n-1}, \dots, a_0]_b = \sum_{i=0}^{n} a_i b^i](https://s0.wp.com/latex.php?latex=%5Ba_n%2C+a_%7Bn-1%7D%2C+%5Cdots%2C+a_0%5D_b+%3D+%5Csum_%7Bi%3D0%7D%5E%7Bn%7D+a_i+b%5Ei&bg=ffffff&fg=7f8c8d&s=0&c=20201002)



![x = [a_n, \dots, a_0]](https://s0.wp.com/latex.php?latex=x+%3D+%5Ba_n%2C+%5Cdots%2C+a_0%5D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)



Observation:
is a palindrome in base
and base
, I wonder if I can find such a palindrome for any pair of bases?
is a palindrome for any pair of bases, but one-digit palindromes are not very interesting. Let’s make sure our palindrome has at least 2 digits in both bases.
Formal statement of the conjecture:
For any pair of integers 

Numerical evidence:
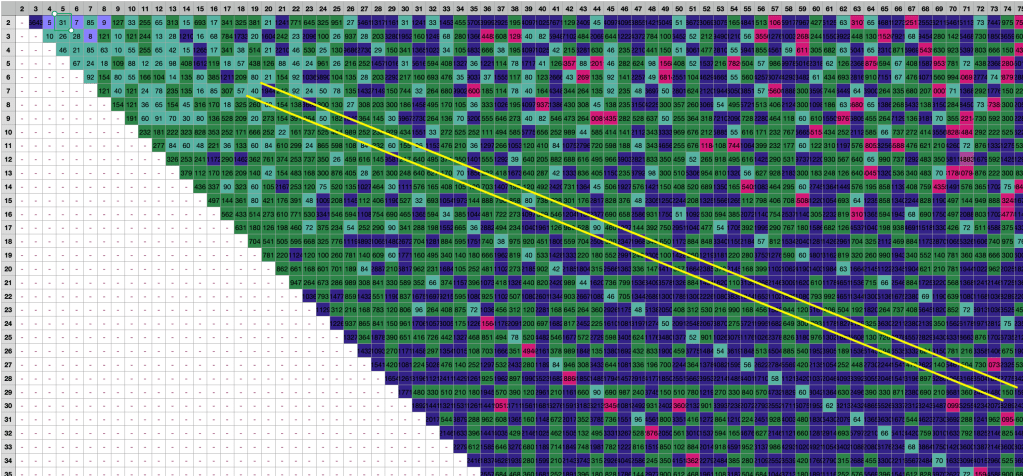
After enumerating a few small examples, I did what one should always do when one stumbles on a list of interesting numbers: plug it into the OEIS. It pointed me to A293925, which enumerates exactly my sequence, first authored in 2017. Note that it is natural to view this sequence as an upper-triangular matrix 



- every pair of bases has such a nice, finite, dual palindrome;
- there isn’t some point/line in the matrix beyond which all pairs of bases fail to have a dual palindrome.
As is, the OEIS listing makes no mention of proving either of these statements, and my own perusal of the literature could not find anything either. (I am not saying it couldn’t possibly be some obscure corollary of a paper too dense to read or too obscure to be findable online, but even if it is, it needs to be brought to light. The OEIS does like to make sure its sequences are well defined and actually sequences. )

The next step is to generate some more data. I have put together a Google Colab notebook with my computational work on the matter. You’re welcome to have a look through it yourself, but ultimately generating more finite cases doesn’t really help a great deal with proving the conjecture. The details are not worth going over here, but it does produce some lovely images which I will scatter throughout. The important takeaway is that there is fairly thorough evidence to suggest that the conjecture is true. It would be selfish to state a conjecture based on purely computational results and demand somebody else solves the problem, without at least trying to solve the problem myself, so here goes. Fair warning I have no experience in number theory, so consider that a warning if you do.
Partial theoretical results
So far I can contribute the following results. They are incredibly elementary, but it feels like I would need a much stronger understanding of number theory to make a more insightful contribution.
Remark 1: ![x = a^c + 1 = [1,0,0,\dots,0,0,1]_a = [1,1]_{a^c}](https://s0.wp.com/latex.php?latex=x+%3D+a%5Ec+%2B+1+%3D+%5B1%2C0%2C0%2C%5Cdots%2C0%2C0%2C1%5D_a+%3D+%5B1%2C1%5D_%7Ba%5Ec%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)

This fact is self-evident, and enough on its own to answer the second point, namely that there are finite entries to the matrix for arbitrarily large rows and columns. But of course the number of entries guaranteed by this result is quite sparse. We can generalise it as follows:
Remark 2: ![x = a^{bc} + 1 = (a^b)^c + (a^b)^0 = [1,0,0,\dots,0,1]_{a^b} = (a^c)^b + (a^c)^0 = [1,0,0,\dots,0,1]_{a^c}](https://s0.wp.com/latex.php?latex=x+%3D+a%5E%7Bbc%7D+%2B+1+%3D+%28a%5Eb%29%5Ec+%2B+%28a%5Eb%29%5E0+%3D+%5B1%2C0%2C0%2C%5Cdots%2C0%2C1%5D_%7Ba%5Eb%7D+%3D+%28a%5Ec%29%5Eb+%2B+%28a%5Ec%29%5E0+%3D+%5B1%2C0%2C0%2C%5Cdots%2C0%2C1%5D_%7Ba%5Ec%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)

That gives us many more examples, and solves the problem whenever the two bases are both powers of a common integer

There seems to be a sequence of duals all a knight’s move apart, and each only 2 greater than the last, while the nearby duals seem to get bigger much quicker. The following remark explains why we see such a nice sequence.
Remark 3: If ![x = b+1 = [1,1]_b = 2a+2 = [2,2]_a](https://s0.wp.com/latex.php?latex=x+%3D+b%2B1+%3D+%5B1%2C1%5D_b+%3D+2a%2B2+%3D+%5B2%2C2%5D_a&bg=ffffff&fg=7f8c8d&s=0&c=20201002)
![x + 2 = (b+1)+2 = (b+2)+1 = [1,1]_{b+2} = (2a+2)+2 = 2(a+1)+2 = [2,2]_{a+1}](https://s0.wp.com/latex.php?latex=x+%2B+2+%3D+%28b%2B1%29%2B2+%3D+%28b%2B2%29%2B1+%3D+%5B1%2C1%5D_%7Bb%2B2%7D+%3D+%282a%2B2%29%2B2+%3D+2%28a%2B1%29%2B2+%3D+%5B2%2C2%5D_%7Ba%2B1%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)


![8 = [1,1]_7 = [2,2]_3](https://s0.wp.com/latex.php?latex=8+%3D+%5B1%2C1%5D_7+%3D+%5B2%2C2%5D_3&bg=ffffff&fg=7f8c8d&s=0&c=20201002)


![x = 8 + 2i = [1,1]_{7+2i} = [2,2]_{3+i}](https://s0.wp.com/latex.php?latex=x+%3D+8+%2B+2i+%3D+%5B1%2C1%5D_%7B7%2B2i%7D+%3D+%5B2%2C2%5D_%7B3%2Bi%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)
Remark 4: If ![x = b+1 = [1,1]_b = da+d = [d,d]_a](https://s0.wp.com/latex.php?latex=x+%3D+b%2B1+%3D+%5B1%2C1%5D_b+%3D+da%2Bd+%3D+%5Bd%2Cd%5D_a&bg=ffffff&fg=7f8c8d&s=0&c=20201002)
![x + d = (b+1)+d = (b+d)+1 = [1,1]_{b+d} = (da+d)+d = d(a+1)+d = [d,d]_{a+1}](https://s0.wp.com/latex.php?latex=x+%2B+d+%3D+%28b%2B1%29%2Bd+%3D+%28b%2Bd%29%2B1+%3D+%5B1%2C1%5D_%7Bb%2Bd%7D+%3D+%28da%2Bd%29%2Bd+%3D+d%28a%2B1%29%2Bd+%3D+%5Bd%2Cd%5D_%7Ba%2B1%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)

This is technically a generalisation, but not a very useful one. A cursory search of the first few cells reveals that most of the dual palindromes which would serve as the first in a sequence of this form are all of the form ![[1,1]_b = [2,2]_a](https://s0.wp.com/latex.php?latex=%5B1%2C1%5D_b+%3D+%5B2%2C2%5D_a&bg=ffffff&fg=7f8c8d&s=0&c=20201002)
![15 = [1,1]_{14} = [3,3]_4](https://s0.wp.com/latex.php?latex=15+%3D+%5B1%2C1%5D_%7B14%7D+%3D+%5B3%2C3%5D_4&bg=ffffff&fg=7f8c8d&s=0&c=20201002)
![[1,1]_b = [d,d]_a](https://s0.wp.com/latex.php?latex=%5B1%2C1%5D_b+%3D+%5Bd%2Cd%5D_a&bg=ffffff&fg=7f8c8d&s=0&c=20201002)




 -knight’s move family produced by remark 4.
-knight’s move family produced by remark 4. If we squint at our matrix, we eventually notice other knight’s move families, but it seems that having a starter dual is the hardest part, and the easiest way to find a family is to look for a streak of blues on a knight’s move diagonal, not by looking for the starter. Further, if we pick out a random cell, it would be nice if there were another cell just down and to the right of a slightly larger value, this would suggest it belongs to some sort of knight’s move family. But we typically don’t find this. More broadly, if most duals belonged to a knight’s move family, we would expect the size of the smallest dual palindrome to grow roughly linearly as we make knight’s moves, but again, we typically don’t see this. From this we can learn that any attempt to capture a general dual palindrome as part of a knight’s move family of duals will probably need that family to grow larger than linearly. So we need to generalise more. Eventually we might spot the following family:
 -knight’s move family growing by 10 each step.
-knight’s move family growing by 10 each step. Which motivates the following:
Remark 5: If ![x =2b+2 = [2,2]_b = 5a+5 = [5,5]_a](https://s0.wp.com/latex.php?latex=x+%3D2b%2B2+%3D+%5B2%2C2%5D_b+%3D+5a%2B5+%3D+%5B5%2C5%5D_a&bg=ffffff&fg=7f8c8d&s=0&c=20201002)
![x + 10 = 2b+2+10 = 2b+10+2 = 2(b+5)+2 = [2,2]_{b+5} = 5a+5+10 = 5a+10+5 = 5(a+2)+5 = [5,5]_{a+2}](https://s0.wp.com/latex.php?latex=x+%2B+10+%3D+2b%2B2%2B10+%3D+2b%2B10%2B2+%3D+2%28b%2B5%29%2B2+%3D+%5B2%2C2%5D_%7Bb%2B5%7D+%3D+5a%2B5%2B10+%3D+5a%2B10%2B5+%3D+5%28a%2B2%29%2B5+%3D+%5B5%2C5%5D_%7Ba%2B2%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)


The interesting observation being that our knight’s move is now more than 1 step in both directions, and the increase in the size of the dual at each step is a common multiple of the digits. Like a broken record, we generalise as follows:
Remark 6: If ![x =cb+c = [c,c]_b = da+d = [d,d]_a](https://s0.wp.com/latex.php?latex=x+%3Dcb%2Bc+%3D+%5Bc%2Cc%5D_b+%3D+da%2Bd+%3D+%5Bd%2Cd%5D_a&bg=ffffff&fg=7f8c8d&s=0&c=20201002)
![x + cd = cb+c + cd = c(b+d)+c = [c,c]_{b+d} = da+d + cd = d(a+c)+d = [d,d]_{a+c}](https://s0.wp.com/latex.php?latex=x+%2B+cd+%3D+cb%2Bc+%2B+cd+%3D+c%28b%2Bd%29%2Bc+%3D+%5Bc%2Cc%5D_%7Bb%2Bd%7D+%3D+da%2Bd+%2B+cd+%3D+d%28a%2Bc%29%2Bd+%3D+%5Bd%2Cd%5D_%7Ba%2Bc%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)

This feels like the end of the easy generalisations of what we’ve seen so far, in that we can take any dual palindrome
- handle starters with more than two digits in either base,
- generate a knight’s move family in an arbitrary direction, not one dictated by the digits of the starter, or
- envision an entirely new approach to creating dual palindromes.
The last of these is a blind hope based on unique insight (that’s where somebody else can swoop in please!), not a predictable strategy, so really we are stuck with either of the first two. The second point would itself require some new insight, as everything we have done so far carefully chooses the step size at each knight’s move so it factors nicely with both digits, in general its not clear how we could do this. So we are left with the first point. Certainly it would be relevant to understand how many bases a typical minimum dual palindrome has. We can analyse the record entries of the sequence as a heuristic for the worst case scenario:
| smallest dual palindrome in bases and | | | digits in base | digits in base |
| 6643 | 2 | 3 | 13 | 9 |
| 9686 | 4 | 26 | 7 | 3 |
| 9902 | 7 | 34 | 5 | 3 |
| 16008 | 7 | 35 | 5 | 3 |
| 20512 | 30 | 37 | 3 | 3 |
| 33577 | 5 | 42 | 7 | 3 |
| 33621 | 34 | 51 | 3 | 3 |
| 40243 | 36 | 54 | 3 | 3 |
| 47723 | 38 | 57 | 3 | 3 |
| 55155 | 10 | 60 | 5 | 3 |
| 56115 | 40 | 60 | 3 | 3 |
| 65347 | 42 | 63 | 3 | 3 |
| 65883 | 11 | 66 | 5 | 3 |
| 73606 | 44 | 66 | 3 | 3 |
| 120250 | 57 | 68 | 3 | 3 |
| 248833 | 12 | 71 | 6 | 3 |
| 620832 | 11 | 88 | 6 | 3 |
| 648170 | 90 | 135 | 3 | 3 |
| 694314 | 92 | 138 | 3 | 3 |
| 44838080 | 42 | 139 | 5 | 4 |
| 2000608059 | 18 | 161 | 8 | 5 |
| 4045926645 | 24 | 191 | 7 | 5 |
| 25594427566 | 40 | 399 | 7 | 5 |
| 61756843258 | 35 | 489 | 7 | 5 |
| 906370255519 | 60 | 899 | 7 | 5 |
| 2873008152176 | 84 | 1175 | 7 | 5 |
| 84598768520000 | 72 | 1727 | 8 | 5 |
My first thought when seeing these records is to remark that the dual palindrome in bases 2 and 3 (literally the first entry) is by far the worst in terms of number of digits, even up to the first 

![x = [1,0, \dots, 01]_{2} = [1,1]_{2^{1000}}](https://s0.wp.com/latex.php?latex=x+%3D+%5B1%2C0%2C+%5Cdots%2C+01%5D_%7B2%7D+%3D+%5B1%2C1%5D_%7B2%5E%7B1000%7D%7D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)

Results I’m not really sure what to do with
The heading speaks for itself, perhaps someone smarter than me can figure out why these might be useful observations.
Remark A: If ![[a_0, a_1, a_2, \dots a_2, a_1, a_0]](https://s0.wp.com/latex.php?latex=%5Ba_0%2C+a_1%2C+a_2%2C+%5Cdots+a_2%2C+a_1%2C+a_0%5D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)


has 
Proof:


![[a_0, a_1, a_2, \dots a_{n-2}, a_{n-1}, a_n]](https://s0.wp.com/latex.php?latex=%5Ba_0%2C+a_1%2C+a_2%2C+%5Cdots+a_%7Bn-2%7D%2C+a_%7Bn-1%7D%2C+a_n%5D&bg=ffffff&fg=7f8c8d&s=0&c=20201002)



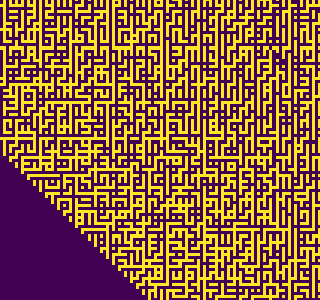
Remark B: By colouring each cell of the table by residue class 
 for various . Purple is 0, through to yellow is
for various . Purple is 0, through to yellow is  . [Warning: very big gif, might take a while to load.]
. [Warning: very big gif, might take a while to load.]For each value of 
- There are gaps, not every element on one of the gridlines is necessarily purple.
- The gridlines are spaced
- The vertical gridlines seem to be one unit wide while the horizontal gridlines seem to be two units wide.
- They seem to become more clearly defined further down and to the right.
- Some values of
More images for higher values of
Remark C: Of particular note is the 
 colouring. For technical reasons this image only shows the 500×500 table, but if you click the image you can view an even more enormous image which shows the 1000×1000 table in its full glory. Warning, the image is 7606×7616 pixels.
colouring. For technical reasons this image only shows the 500×500 table, but if you click the image you can view an even more enormous image which shows the 1000×1000 table in its full glory. Warning, the image is 7606×7616 pixels. What gridlines 2 units apart would look like isn’t exactly clear, but we see interesting and varied emergent behaviour in different parts of the table:

Concluding remarks
Many thanks go to Robert G. Wilson v, without whose collaboration the depth of computational results would be noticeably more meagre.
If you have any further insight, please share 🙂
Edits
January 2023
I have traced this question back to Question #3 of Erich Friedman’s Problem of the month, June 1999. Letting 



At the time of writing I could not come up with a formal description of the maze-like pattern in the 




I summarised this problem in a post on MathsFeed.

 is a graph with vertex set the elements of the group
is a graph with vertex set the elements of the group  , and edge set
, and edge set  . A Hamilton cycle is a closed path which visits every vertex in a graph exactly once, and a Hamilton decomposition of a graph is a partition of its edge-set into Hamilton cycles. It has been conjectured by Alspach that every connected
. A Hamilton cycle is a closed path which visits every vertex in a graph exactly once, and a Hamilton decomposition of a graph is a partition of its edge-set into Hamilton cycles. It has been conjectured by Alspach that every connected  -regular Cayley graph of a finite abelian group has a Hamilton decomposition. Another conjecture from Alspach and Rosenfeld says that if
-regular Cayley graph of a finite abelian group has a Hamilton decomposition. Another conjecture from Alspach and Rosenfeld says that if  is a 3-connected, 3-regular graph with a Hamilton cycle, then the Cartesian product
is a 3-connected, 3-regular graph with a Hamilton cycle, then the Cartesian product  is Hamilton decomposable. Bermond also conjectures that if two graphs are Hamilton decomposable, then their Cartesian product is also Hamilton decomposable. These three conjectures remain open, and we examine their infinite generalisations. Specifically, we study two-ended infinite abelian groups, and the Cartesian product
is Hamilton decomposable. Bermond also conjectures that if two graphs are Hamilton decomposable, then their Cartesian product is also Hamilton decomposable. These three conjectures remain open, and we examine their infinite generalisations. Specifically, we study two-ended infinite abelian groups, and the Cartesian product  , where
, where  is a two-way infinite path. The notion of a Hamilton cycle can be generalised to infinite graphs as a spanning two-way infinite path. However, if the graph has two ends, some graphs contain an end-separating edge-cut which differs in parity from the number of paths in the decomposition, precluding the existence of a decomposition into spanning two-way infinite paths. The question, then, is whether this is the only obstruction to a Hamilton decomposition.
We show that if
is a two-way infinite path. The notion of a Hamilton cycle can be generalised to infinite graphs as a spanning two-way infinite path. However, if the graph has two ends, some graphs contain an end-separating edge-cut which differs in parity from the number of paths in the decomposition, precluding the existence of a decomposition into spanning two-way infinite paths. The question, then, is whether this is the only obstruction to a Hamilton decomposition.
We show that if 


You must be logged in to post a comment.